
Abstract
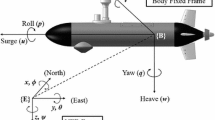
A nonholonomic control method is considered for stabilizing all attitudes and positions (x, y, or z) of an underactuated X4 autonomous underwater vehicle (AUV) with four thrusters and six degrees of freedom (DOF), in which the positions are stabilized according to the Lyapunov stability theory. A dynamic model is first derived, and then a sequential nonlinear control strategy is implemented for the X4-AUV which is composed of translational and rotational subsystems. A controller for the translational subsystem stabilizes one position out of the x-, y-, and z-coordinates, whereas controllers for the rotational subsystems generate the desired roll, pitch, and yaw angles. Thus, the rotational controllers stabilize all the attitudes of the X4-AUV at the desired (x-, y-, or z-) position of the vehicle. Some numerical simulations are conducted to demonstrate the effectiveness of the proposed controllers.
Similar content being viewed by others

References
Kolmanovsky I, McClamroch NH (1995) Developments in nonholonomic control problems. IEEE Control Syst Mag 15(6):20–36
Brockett JW (1983) Asymptotic stability and feedback stabilization. In: Brockett RW, Millman RS, Sussmann HJ (eds). Differential geometric control theory. Birkhauser, Boston, pp 181–191
Nakamura Y, Savant S (1991) Nonholonomic motion control of an autonomous underwater vehicle. IEEE/RSJ International Workshop on Intelligent Robots and Systems, pp 1254–1259
Fossen TI (1994) Guidance and control of ocean vehicles. Wiley, New York
Leonardo NE (1997) Stability of a bottom-heavy underwater vehicle. Automatica 33(1):331–346
Okamura K (2009) Position and attitude control for an autonomous underwater robot using a manifold theory. Master’s Thesis, Saga University
Bouabdallah S, Murrieri P, Siegwart R (2005) Towards autonomous indoor micro VTOL. Auton Robots 18:171–183
Fantoni I, Lozano R, Spong MW (2000) Energy-based control of the pendubot. IEEE Trans Autom Control 45(4):725–729
Zain ZM, Watanabe K, Danjo T, et al (2010) Stabilization control for an X4-AUV. Proceedings of the 3rd International Conference on Underwater System Technology: Theory and Applications (USYS’ 10), November 1–2, Cyberjaya, Malaysia, pp 13–17
Zain ZM, Watanabe K, Nagai I, et al (2010) The stabilization control of a position and all attitudes for an X4-AUV. Proceedings of the 5th International Conference on Soft Computing and Intelligent Systems, and the 11th International Symposium on Advanced Intelligent Systems (SCIS and ISIS 2010), December 8–12, Okayama, Japan, pp 1265–1270
Author information
Authors and Affiliations
Corresponding author
Additional information
This work was presented in part and was awarded Young Author Award at the 16th International Symposium on Artificial Life and Robotics, Oita, Japan, January 27–29, 2011
About this article
Cite this article
Zain, Z.M., Watanabe, K., Izumi, K. et al. A nonholonomic control method for stabilizing an X4-AUV. Artif Life Robotics 16, 202–207 (2011). https://doi.org/10.1007/s10015-011-0918-8
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10015-011-0918-8