
Abstract
Central catadioptric cameras with a single effective viewpoint contain both mirrors and pinhole cameras that increase the imaging field of view. In this study, the common pole–polar properties of central catadioptric sphere or line images are investigated and used for camera calibration. From these properties, the pole and polar with respect to the image of absolute conic and the modified image of absolute conic, respectively, can be recovered according to the generalized eigenvalue decomposition. Moreover, these techniques are valid for paracatadioptric sensors with the degenerate conic dual to the circular points being considered. At least three images of spheres or lines are required to completely calibrate any central catadioptric camera. The intrinsic parameters of the camera, the shape of reflective mirror, and the distortion parameters can be linearly estimated using the algebraic and geometric constraints of the sphere or line images obtained by the central catadioptric camera. The obtained experimental results demonstrate the effectiveness and feasibility of the proposed calibration algorithm.









Similar content being viewed by others


References
Andrew, A. M. (2001). Multiple view geometry in computer vision. Kybernetes.
Baker, S., & Nayar, S. K. (1998). A theory of catadioptric image formation (pp. 35–42), IEEE Computer Society.
Baker, S., & Nayar, S. K. (1999). A theory of single-viewpoint catadioptric image formation. International Journal of Computer Vision, 35(2), 175–196.
Barreto, J. P. d. A. (2004). General central projection systems: Modeling, calibration and visual servoing. Ph.D. thesis.
Barreto, J. P., & Araujo, H. (2005). Geometric properties of central catadioptric line images and their application in calibration. IEEE Transactions on Pattern Analysis and Machine Intelligence, 27(8), 1327–1333.
Barreto, J. P., & Araújo, H. (2006). Fitting conics to paracatadioptric projections of lines. Computer Vision and Image Understanding, 101(3), 151–165.
Daucher, N., Dhome, M. & Lapresté, J. (1994). Camera calibration from spheres images. DBLP .
Deng, X., Wu, F., & Wu, Y. (2007). An easy calibration method for central catadioptric cameras. Acta Automatica Sinica, 33(8), 801–808.
Duan, H., Mei, L., Shang, Y. & Hu, C. (2014a). Calibrating focal length for paracatadioptric camera from one circle image, vol. 1, (56–63) IEEE.
Duan, H., Mei, L., Wang, J., Song, L. & Liu, N. (2014b). Properties of central catadioptric circle images and camera calibration, (pp. 229–239), Springer.
Durrant-Whyte, H. F., & Bailey, T. (2006). Simultaneous localization and mapping: part I. IEEE Robotics & Automation Magazine, 13(2), 99–110.
Fitzgibbon, A. W., Pilu, M., & Fisher, R. B. (1999). Direct least square fitting of ellipses. IEEE Transactions on Pattern Analysis and Machine Intelligence, 21(5), 476–480.
Geyer, C. & Daniilidis, K. (2000). A unifying theory for central panoramic systems and practical implications, (pp. 445–461), Springer.
Geyer, C., & Daniilidis, K. (2001). Catadioptric projective geometry. International Journal of Computer Vision, 45(3), 223–243.
Jiménez, J., & de Miras, J. R. (2012). Three-dimensional thinning algorithms on graphics processing units and multicore cpus. Concurrency and Computation: Practice and Experience, 24(14), 1551–1571.
Kang, S. B. (2000). Catadioptric self-calibration, vol. 1, 201–207 IEEE.
Liu, Z., Wu, Q., Wu, S., & Pan, X. (2017). Flexible and accurate camera calibration using grid spherical images. Optics Express, 25(13), 15269–15285.
Mei, C. & Rives, P. (2007). Single view point omnidirectional camera calibration from planar grids.
Puig, L., Bastanlar, Y., Sturm, P., Guerrero, J. J., & Barreto, J. (2011). Calibration of central catadioptric cameras using a DLT-like approach. International Journal of Computer Vision, 93(1), 101–114.
Scaramuzza, D., Martinelli, A. & Siegwart, R. (2007). A toolbox for easily calibrating omnidirectional cameras.
Scaramuzza, D., & Siegwart, R. (2008). Appearance-guided monocular omnidirectional visual odometry for outdoor ground vehicles. IEEE Transactions on Robotics, 24(5), 1015–1026.
Schönbein, M., Strauss, T., & Geiger, A. (2014). Calibrating and centering quasi-central catadioptric cameras.
Semple, J. G. (1952). Algebraic projective geometry. Oxford at the Clarendon Press.
Svoboda, T., & Pajdla, T. (2002). Epipolar geometry for central catadioptric cameras. International Journal of Computer Vision, 49(1), 23–37.
Tahri, O., & Araújo, H. (2012). Non-central catadioptric cameras visual servoing for mobile robots using a radial camera model, (pp. 1683–1688). IEEE.
Wu, Y., Zhu, H., Hu, Z. & Wu, F. (2004). Camera calibration from the quasi-affine invariance of two parallel circles, (pp. 190–202) Springer.
Wu, F., Duan, F., Hu, Z., & Wu, Y. (2008). A new linear algorithm for calibrating central catadioptric cameras. Pattern Recognition, 41(10), 3166–3172.
Yang, F., Zhao, Y., & Wang, X. (2020). Camera calibration using projective invariants of sphere images. IEEE Access, 8, 28324–28336.
Ying, X. & Hu, Z. (2004). Can we consider central catadioptric cameras and fisheye cameras within a unified imaging model.
Ying, X. & Zha, H. (2006). Interpreting sphere images using the double-contact theorem.
Ying, X., & Hu, Z. (2004). Catadioptric camera calibration using geometric invariants. IEEE Transactions on Pattern Analysis and Machine Intelligence, 26(10), 1260–1271.
Ying, X., & Zha, H. (2006). Geometric interpretations of the relation between the image of the absolute conic and sphere images. IEEE Transactions on Pattern Analysis and Machine Intelligence, 28(12), 2031–2036.
Ying, X., & Zha, H. (2008). Identical projective geometric properties of central catadioptric line images and sphere images with applications to calibration. International Journal of Computer Vision, 78(1), 89–105.
Zhang, H., Kwan-yee, K. W., & Zhang, G. (2007). Camera calibration from images of spheres. IEEE Transactions on Pattern Analysis and Machine Intelligence, 29(3), 499–502.
Zhang, L., Du, X., & Liu, J.-L. (2011). Using concurrent lines in central catadioptric camera calibration. Journal of Zhejiang University Science C, 12(3), 239–249.
Zhao, Y., Li, Y., & Zheng, B. (2018). Calibrating a paracatadioptric camera by the property of the polar of a point at infinity with respect to a circle. Applied Optics, 57(15), 4345–4352.
Zhao, Y., Wang, S., & You, J. (2020). Calibration of paracatadioptric cameras based on sphere images and pole–polar relationship. OSA Continuum, 3(4), 993–1012.
Acknowledgements
This work was supported in part by: the National Natural Science Foundation of China (grant numbers 61663048 and 11861075); the Program for Innovative Research Team in Science and Technology for the Universities of Yunnan Province; and the Key Joint Project of the Science and Technology Department of Yunnan Province and Yunnan University (grant 2018FY001(-014)).
Author information
Authors and Affiliations
Corresponding author
Additional information
Communicated by Adrien Bartoli.
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendices
Appendix A
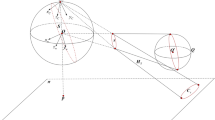
In the MCS, the unit normal vectors of planes \({{\varvec{\pi }} _m}\) and \({{\varvec{\pi } _S}}\) are \({{\varvec{O}}_c}{\varvec{O}}\mathrm{{ = }}{\left[ {\begin{array}{*{20}{c}} 0&0&1 \end{array}} \right] ^T}\) and \({{\varvec{O}}_c}{\varvec{N}}\mathrm{{ = }}{\left[ {\begin{array}{*{20}{c}} {{n_x}}&{{n_y}}&{{n_z}} \end{array}} \right] ^T}\), respectively. Since the line \({{\varvec{O}}_c}{\varvec{O}}\) and the normal \({{\varvec{O}}_c}{\varvec{N}}\) are coplanar, the corresponding projection points \(\bar{{\varvec{O}}}\mathrm{{ = }}{\left[ {\begin{array}{*{20}{c}} 0&0&1 \end{array}} \right] ^T}\) and \(\bar{{\varvec{N}}}\mathrm{{ = }}{\left[ {\begin{array}{*{20}{c}} {{n_x}}&{{n_y}}&{{n_z}} \end{array}} \right] ^T}\) are collinear. Further, the intersection line \({\varvec{D}}\) of planes \({\varvec{\pi } _m}\) and \({\varvec{\pi } _S}\) is orthogonal to the plane containing both the normal \({{\varvec{O}}_c}{\varvec{N}}\) and \({{\varvec{O}}_c}{\varvec{O}}\). Considering two \(3 \times 3\) symmetric matrices \({\bar{{\varvec{C}}}_m}\) and \({\bar{{\varvec{C}}}}\), and solving Eq. (9) yields the generalized eigenvalue \({\lambda _1}\) of \(\left( {{{\bar{{\varvec{C}}}}_m},\bar{{\varvec{C}}}} \right) \) and the corresponding generalized eigenvector \({\bar{{\varvec{v}}}_1}\) (computed by MAPLE) as \({\lambda _1} = {\left( {{d_0} - \xi {n_z}} \right) ^2}\) and \({\bar{{\varvec{v}}}_1} = {\left[ {\begin{array}{*{20}{c}} { - {n_y}}&{{n_x}}&0 \end{array}} \right] ^T}\), respectively. Thus, the point \({\bar{{\varvec{v}}}_1} = {\left[ {\begin{array}{*{20}{c}} { - {n_y}}&{{n_x}}&0 \end{array}} \right] ^T}\) is an infinity point of the line \({\varvec{D}}\). In Fig. 2, according to Eq. (9), the common polar corresponding to \({\bar{{\varvec{v}}}_1}\) with respect to \({\bar{{\varvec{C}}}_m}\) and \({\bar{{\varvec{C}}}}\) aligns with the major axis \(\bar{\varvec{\mu }} = {\bar{\varvec{\mu }} _1} = {\left[ {\begin{array}{*{20}{c}} { - {n_y}}&{{n_x}}&0 \end{array}} \right] ^T} \) (see Table 1) formed by \(\bar{{\varvec{O}}}\) and \(\bar{{\varvec{N}}}\) Barreto and Araujo (2005). Hence, according to the Definition 4, the infinite point \({\bar{{\varvec{v}}} _1}\) and the line \({\bar{\varvec{\mu }} _1}\) also exhibit a pole–polar relationship with respect to the absolute conic \({\bar{\varvec{\Omega }} _\infty }\)(not depicted) Andrew (2001). As the projectivity \({{\varvec{H}}_c}\) preserves incidence and collinearity, the property holds in the central catadioptric image plane after the transformation \({{\varvec{H}}_c}\). Thus, the pole–polar relation between \({\hat{{\varvec{v}}}_1}\) and \({\hat{\varvec{\mu }} _1}\), which corresponds to the common pole and polar for \({\hat{{\varvec{C}}}_m}\) and \({\hat{{\varvec{C}}}}\), respectively, is preserved under the projection transformation \({{\varvec{H}}_c}\). Notably, the locus \({\hat{\varvec{\mu }} _1}\) is no longer the major axis of the catadioptric sphere or the line image \({\hat{{\varvec{C}}}}\). However, from Fig. 2, the point \({\hat{{\varvec{v}}}_1}\) and line \({\hat{\varvec{\mu }} _1}\) can be uniquely determined from the generalized eigenvectors of the conics \({\hat{{\varvec{C}}}_m}\) and \({\hat{{\varvec{C}}}}\) , as \({\hat{\varvec{\mu }} _1}\) is the only line intersecting both \({\hat{{\varvec{C}}}_m}\) and \({\hat{{\varvec{C}}}}\) at two points.
Appendix B
For a paracatadioptric camera, according to Eq. (4), replacing \(\xi \) by 1 yields
Consider the dual of circle \({\bar{{\varvec{C}}}_S}^\mathrm{{*}}\), which satisfies
From Eq. (7), the dual of the conic curve \({\hat{{\varvec{C}}}^ * }\) is the paracatadioptric image of a line or sphere in the scene satisfying
By simplification, equation Eq. B3 can be rearranged as
where \({\hat{{\varvec{C}}}_\infty }^*\mathrm{{ = }}{{\varvec{H}}_c}\left[ {\begin{array}{*{20}{c}} \mathrm{{1}}&{}\mathrm{{0}}&{}\mathrm{{0}}\\ \mathrm{{0}}&{}\mathrm{{1}}&{}\mathrm{{0}}\\ \mathrm{{0}}&{}\mathrm{{0}}&{}\mathrm{{0}} \end{array}} \right] {{\varvec{H}}_c}^T\) is the projection of the CDCP, \({\hat{{\varvec{v}}}^*} = \frac{1}{{\sqrt{\left( {1 - {d_0}^2} \right) } }}{{\varvec{H}}_c}\left[ {\begin{array}{*{20}{c}} {{m_x}}\\ {{m_y}}\\ {{d_0} - {m_z}} \end{array}} \right] \). In a similar manner, from Proposition 4, \({\hat{{\varvec{C}}}_\infty }^*\) can be computed by considering the generalized eigenvectors of any two line or sphere images. Note that, from Eq. B4 , for paracatadioptric systems, the dual of the line or sphere image is in double contact with a degenerated-line (envelope) conic \(\hat{{\varvec{C}}}_\infty ^*\) consisting of the image of the circular points. Similar results can be obtained using the method presented by Ying and Zha (2008).
Rights and permissions
Springer Nature or its licensor holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Yang, F., Zhao, Y. & Wang, X. Common Pole–Polar Properties of Central Catadioptric Sphere and Line Images Used for Camera Calibration. Int J Comput Vis 131, 121–133 (2023). https://doi.org/10.1007/s11263-022-01696-4
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11263-022-01696-4