
Abstract
Single hidden layer feedforward neural networks can represent multivariate functions that are sums of ridge functions. These ridge functions are defined via an activation function and customizable weights. The paper deals with best non-linear approximation by such sums of ridge functions. Error bounds are presented in terms of moduli of smoothness. The main focus, however, is to prove that the bounds are best possible. To this end, counterexamples are constructed with a non-linear, quantitative extension of the uniform boundedness principle. They show sharpness with respect to Lipschitz classes for the logistic activation function and for certain piecewise polynomial activation functions. The paper is based on univariate results in Goebbels (Res Math 75(3):1–35, 2020. https://rdcu.be/b5mKH)
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
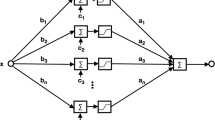
A feedforward neural network with an activation function \(\sigma :\mathbb {R}\rightarrow \mathbb {R}\), d input nodes, one output node, and one hidden layer of n neurons implements a multivariate real-valued function \(g :\mathbb {R}^d\rightarrow \mathbb {R}\) of type
see Fig. 1. For vectors \(\mathbf {w}_k =(w_{k,1},\ldots , w_{k,d})\) and \(\mathbf {x}=(x_1,\ldots ,x_d)\),
is the standard inner product of \(\mathbf {w}_k,\,\mathbf {x}\in \mathbb {R}^d\). Summands \(\sigma (\mathbf {w}_k \cdot \mathbf {x}+c_k)\) are ridge functions. They are constant on hyperplanes \(\mathbf {w}_k \cdot \mathbf {x}= c\), \(c\in \mathbb {R}\).

One hidden layer neural network that computes \(\sum _{k=1}^n a_k \sigma (\mathbf {w}_k \cdot \mathbf {x}+c_k)\)
For non-constant bounded monotonically increasing and continuous activation functions \(\sigma \) the universal approximation property holds, see the paper of Funahashi [14]: Given a continuous function f on a compact set then for each \(\varepsilon >0\) there exists \(n\in \mathbb {N}\) and a function \(g_n\in \mathcal{M}_n\) such that the sup-norm of \(f-g_n\) is less than \(\varepsilon \). Cybenko showed this property in [10] for a different class of continuous activation functions that do not have to be monotone. Leshno et al. proved for continuous activation functions \(\sigma \) in [23] (cf. [6]) that the universal approximation property is equivalent to \(\sigma \) being not an algebraic polynomial. Continuity is not a necessary prerequisite for the universal approximation property, see [21].
We discuss error bounds for best approximation by functions of \({{\mathcal {M}}}_n\) in terms of moduli of smoothness for an arbitrary number d of input nodes in Sect. 2. These results are quantitative extensions of the qualitative universal approximation property. They introduce convergence orders that depend on the smoothness of functions to be approximated.
Many papers deal with the univariate case \(d=1\). In [11], Debao proved an estimate against a first oder modulus for general sigmoid activation functions. An overview of other estimates against first order moduli is given in doctoral thesis [7], cf. [8]. Under additional assumptions on activation functions, estimates against higher order moduli are possible. For example, one can easily extend the first order estimate of Ritter for approximation with “nearly exponential” activation functions in [29] to higher moduli, see [16]. Similar results can be obtained for activation functions that are arbitrarily often differentiable on some open interval such that they are not an algebraic polynomial on that interval, see [28, Theorem 6.8, p. 176] in combination with [16].
With respect to the general multivariate case, Barron applied Fourier methods in [4] to establish a convergence rate for a certain class of smooth functions in the \(L^2\)-norm. Approximation errors for multi-dimensional bell shaped activation functions were estimated by first order moduli of smoothness or related Lipschitz classes by Anastassiou (e.g. [2]) and Costarelli and Spigler (see e.g. [9] including a literature overview). However, discussed neural network spaces differ from (1). They do not consist of linear combinations of ridge functions. A special network with four layers is introduced in [24] to obtain a Jackson estimate in terms of a first order modulus of smoothness.
Maiorov and Ratsby established an upper bound for functions in Sobolev spaces based on pseudo-dimension in [25, Theorem 2]. Pseudo-dimension is an upper bound of the Vapnik-Chervonenkis dimension (VC dimension) that will also be used in this paper to obtain lower bounds.
With respect to neural network spaces (1) of ridge functions, we apply results of Pinkus [28] and Maiorov and Meir [27] to obtain error bounds for a large class of activation functions either based on K-functional techniques or on known estimates for best approximation with multivariate polynomials in Sect. 2. Both \(L^p\)- and sup-norms are considered.
In Sect. 3, we prove for the logistic activation function that counterexamples \(f_\alpha \) exist for all \(\alpha >0\) such that sup-norm as well as \(L^p\)-norm bounds are in \(O(n^{-\alpha })\) but the error of best approximation is not in \(O(n^{-\beta })\) for \(\beta > \alpha \). This result is a multivariate extension of univariate counterexamples (\(d=1\), one single input node, sup-norm) in [16]. A similar result is shown for piecewise polynomial activation functions with respect to an \(L^2\)-norm bound.
In fact, the non-linear variant of a quantitative uniform boundedness principle in [16] can be applied to construct univariate and multivariate counterexamples. This principle is based on theorems of Dickmeis, Nessel and van Wickeren, cf. [13], that can be used to analyze error bounds of linear approximation processes. Its application, both in a linear and in the given non-linear context, requires the construction of a resonance sequence. To this end, a known result [5] on the VC dimension of networks with logistic activation is used. Theorem 5 in Sect. 3 is formulated as a general means to derive discussed counterexamples from VC dimension estimates. Also, [27] already provides sequences of counterexamples that can be condensed to a single counterexample with the uniform boundedness principle.
There are some published attempts to show sharpness of error bounds for neural network approximation in terms of moduli of smoothness based on inverse theorems. Inverse and equivalence theorems estimate the values of moduli of smoothness by approximation rates. For example, they determine membership to certain Lipschitz classes from known approximation errors. However, the letter [15] proves that the inverse theorem for neural network approximation in [31] as well as the inverse theorems in some related papers are wrong. Smoothness is one feature that favors high approximation rates. But in this non-linear situation, other features (e.g., the “nearly exponential” property or similarity to certain derivatives of the activation function, cf. [22]) also contribute to convergence rates. Such features cannot be sufficiently measured by moduli of smoothness, cf. sequence of counterexamples in [15]. This is the motivation to work with counterexamples instead of inverse or equivalence theorems in Sect. 3.
2 Notation and direct estimates
Let \(\varOmega \subset \mathbb {R}^d\) be an open set. By \(X^p(\varOmega ):=L^p(\varOmega )\) with norm
for \(1\le p<\infty \) and \(X^\infty (\varOmega ):=C(\overline{\varOmega })\) with sup-norm \(\Vert f\Vert _{C(\overline{\varOmega })}:=\sup \{|f(\mathbf {x})| : \mathbf {x}\in \overline{\varOmega }\}\) we denote the usual Banach spaces.
For a multi-index \(\alpha =(\alpha _1,\ldots ,\alpha _d)\in \mathbb {N}_0^d\) with non-negative integer components, let \(|\alpha |:= \sum _{j=1}^d \alpha _j\) be its sum of components. We write \(\mathbf {x}^\alpha := \prod _{j=1}^d x_j^{\alpha _j}\). With \(P_k\) we denote the set of multivariate polynomials with degree at most k, i.e., each polynomial in \(P_k\) is a linear combination of homogeneous polynomials of degree \(l\in \{0,\ldots ,k\}\). To this end, let
be the space of homogeneous polynomials of degree l.
The set of all univariate polynomials with degree at most k is denoted by \(\varPi _k\), i.e., \(\varPi _k=P_k\) for \(d=1\). Let
To obtain the upper estimate, we choose exponents \(\alpha _1,\ldots ,\alpha _{d-1}\) in \(\mathbf {x}^\alpha \) independently from the set \(\{0,\ldots ,k\}\). If the sum of these exponents does not exceed k then \(\alpha _{d}=k-\sum _{j=1}^{d-1} \alpha _j\). Otherwise, we have counted a polynomial with degree greater than k. Thus, the estimate is a coarse upper bound only.
Multivariate polynomials can be represented by univariate polynomials, cf. [28, p. 164]: for a given degree \(k\in \mathbb {N}\) there exist \(s\le (k+1)^{d-1}\) vectors \(\mathbf {w}_1,\ldots ,\mathbf {w}_s \in \mathbb {R}^d\) such that
We use the result [28, p. 176], cf. [19]: Let \(\sigma :\mathbb {R}\rightarrow \mathbb {R}\) be arbitrarily often differentiable on some open interval \(I\subset \mathbb {R}\), i.e. \(\sigma \in C^\infty (I)\), and let \(\sigma \) be no algebraic polynomial on that interval. Then univariate polynomials of degree at most k can be uniformly approximated arbitrarily well on compact sets by choosing parameters \(a_j,b_j,c_j\in \mathbb {R}\) in
Thus due to (2), also multivariate polynomials of degree at most k can be approximated by functions of \({{\mathcal {M}}}_{s(k+1)}\) arbitrarily well on compact sets, i.e., in the sup-norm
Theorem 3.1 in [22] even describes a more general class of multivariate functions that can be approximated arbitrarily well like polynomials.
There holds following lemma from [19, Proposition 4] that extends (3) to simultaneous approximation.
Lemma 1
Let \(\sigma :\mathbb {R}\rightarrow \mathbb {R}\) be arbitrarily often differentiable on an open interval around the origin with \(\sigma ^{(i)}(0)\ne 0\), \(i\in \mathbb {N}_0\). Then for any polynomial \(\pi \in P_k\) of degree at most k, any compact set \(I\subset \mathbb {R}^d\), and each \(\varepsilon >0\) there exists a sufficiently often differentiable function \(g\in {{\mathcal {M}}}_{s(k+1)}\) such that simultaneously for all \(\alpha \in \mathbb {N}_0^d\), \(|\alpha |\le k\),
The requirement that derivatives at zero must not be zero can be replaced by the requirement that \(\sigma \) is no algebraic polynomial on the open interval, see [19].
With n summands of the activation function, polynomials of degree k and their derivatives can be simultaneously approximated arbitrarily well for such values of k that fulfill \(n\ge (k+1)^d \text {, i.e.~} k \le \root d \of {n} -1\), because \((k+1)^d = (k+1)^{d-1} (k+1) \ge s(k+1)\). Especially, polynomials of degree at most
can be approximated arbitrarily well.
Let \(f\in X^p(\varOmega )\), \(\mathbf {h}\in \mathbb {R}^d\), \(r\in \mathbb {N}_0\) und \(t\in \mathbb {R}\). The rth radial difference (with direction \(\mathbf {h}\)) is given via
(if defined). Thus, \(\varDelta _\mathbf {h}^r f=\varDelta _\mathbf {h}^{r-1}\varDelta _\mathbf {h}^1 f =\varDelta _\mathbf {h}^1 \varDelta _\mathbf {h}^{r-1} f\). Let
Then the rth radial modulus of smoothness of a function \(f\in L^p(\varOmega )\), \(1\le p<\infty \), or \(f\in C(\overline{\varOmega })\) is defined via
Our aim is to discuss errors E of best approximation. For \(S\subset X^p(\varOmega )\) and \(f\in X^p(\varOmega )\) let
Thus, \(E(S, f)_{p,\varOmega }\) is the distance between f and S.
As an application of a multivariate equivalence theorem between K-functional and moduli of smoothness, an estimate for best polynomial approximation is proved on Lipschitz graph domains (LG-domains) in [20, Corollary 4, p. 139]. For the definition of not necessarily bounded LG-domains, see [1, p. 66]. For bounded domains, the LG property is equivalent to a Lipschitz boundary. Especially, later discussed bounded d-dimensional open intervals like \((0, 1)^d:=(0, 1)\times \dots \times (0, 1)\) and the unit ball \(\{\mathbf {x}\in \mathbb {R}^d : |\mathbf {x}|<1\}\) are examples for LG-domains.
Let \(\varOmega \) be a bounded LG-domain in \(\mathbb {R}^n\) and \(1\le p\le \infty \), then
with a constant \(C_r\) that is independent of f and k, see [20].
Theorem 1
(Arbitrarily Often Differentiable Functions) Let \(\sigma :\mathbb {R}\rightarrow \mathbb {R}\) be arbitrarily often differentiable on some open interval in \(\mathbb {R}\), and let \(\sigma \) be no algebraic polynomial on that interval, \(f\in X^p(\varOmega )\) for an LG-domain \(\varOmega \in \mathbb {R}^d\), \(1\le p\le \infty \), and \(r\in \mathbb {N}\). For \(n\ge 4^d\) there exists a constant C that is independent of f and k such that
Proof
We combine (3) and (4) with (5) to get
\(\square \)
By using an error bound for best polynomial approximation we are not able to consider advantages of non-linear approximation. However, we will see in the next section that non-linear neural network approximation does not really perform better than polynomial approximation in the worst case.
Most important activation functions, that are not piecewise polynomials, fulfill the requirements of Theorem 1. For example, it provides an error bound for approximation with the sigmoid activation function based on inverse tangent
the logistic function
and ”Exponential Linear Unit” (ELU) activation function
for \(\alpha \ne 0\).
A direct bound for simultaneous approximation of a function and its partial derivatives in the sup-norm can be obtained similarly based on a corresponding estimate for simultaneous approximation by polynomials using a Jackson estimate from [3]:
Lemma 2
Let \(f:\mathbb {R}^d \rightarrow \mathbb {R}\) be a function with compact support such that all partial derivatives up to order \(k\in \mathbb {N}_0\) are continuous. Let \(\overline{\varOmega }\subset \mathbb {R}^d\) be a compact set that contains the support of f. Then there exists a constant \(C\in \mathbb {R}\) (independent of n and f) such that for each \(n\in \mathbb {N}\) a polynomial \(\pi \in P_n\) can be found such that for all \(\alpha \in \mathbb {N}_0^d\) with \(|\alpha |\le \min \{k, n\}\)
Similar to the proof of Theorem 1, we combine this cited result with Lemma 1 to obtain (cf. [32]).
Theorem 2
(Synchronous Sup-Norm Approximation) Let \(\sigma :\mathbb {R}\rightarrow \mathbb {R}\) be arbitrarily often differentiable without being a polynomial. For each function \(f:\mathbb {R}^d \rightarrow \mathbb {R}\) with compact support and continuous partial derivatives up to order \(k\in \mathbb {N}_0\) and each compact set \(\overline{\varOmega }\subset \mathbb {R}^d\) containing the support of f following estimate holds true: For each \(n\in \mathbb {N}\), \(n\ge 4^d\), there exists a constant \(C\in \mathbb {R}\) (independent of n and f) such that for all \(\alpha \in \mathbb {N}_0^d\) with \(|\alpha |\le \min \{k, \root d \of {n} -1\}\)
Requirements of Theorems 1 and 2 are not fulfilled for activation functions that are of type
for \(k\in \mathbb {N}\). The often used ReLU function is obtained for \(k=1\). Corollary 6.11 in [28, p. 178] is an \(L^2\)-norm Jackson estimate for this class of functions. To work with this estimate, we need to introduce Sobolev spaces.
Let \(W_p^{r}(\varOmega )\), \(1\le p< \infty \), be the \(L^p\)-Sobolev space of r-times (in the weak sense) partially differentiable functions on \(\varOmega \subset \mathbb {R}^d\) with semi-norms
and norm \( \Vert f\Vert _{W_p^{r}(\varOmega )} = \sum _{k=0}^r |f|_{W_p^{r}(\varOmega )}\). For r-times continuously differentiable functions f (case \(p=\infty \)) or functions \(f\in W_p^{r}(\varOmega )\) on LG-domains \(\varOmega \), \(1\le p<\infty \), the estimate
holds true, see [20].
According to the Jackson estimate for activation functions (7) in [28, p. 178], let \(d\ge 2\) and \(\varOmega \subset \mathbb {R}^d\) be the d-dimensional unit ball. Then there exists a constant \(C>0\) such that for all \(f\in W_2^{r}(\varOmega )\) with \(\Vert f\Vert _{W_2^{r}(\varOmega )}\le 1\) and \(r\in \mathbb {N}\) with \(r<k+1+\frac{d-1}{2}\) (k being the exponent in (7))
Thus, for all \(f\in W_2^{r}(\varOmega )\) without restriction \(\Vert f\Vert _{W_2^{r}(\varOmega )}\le 1\) there holds true \( E({{\mathcal {M}}}_n, f)_{2,\varOmega } \le C \Vert f\Vert _{W_2^{r}(\varOmega )} n^{-\frac{r}{d}}\). Due to [1, p. 75], a constant \(C_1\) exists independently of f such that \( \Vert f\Vert _{W_2^{r}(\varOmega )} \le C_1[\Vert f\Vert _{L^2(\varOmega )} + |f|_{W_2^{r}(\varOmega )}]\). Together we obtain
This estimate can be extended to moduli of smoothness using K-functional techniques. To this end, we introduce some definitions that will also be needed in the next section for discussing sharpness. A functional T on a normed space X, i.e., T maps X into \(\mathbb {R}\), is non-negative-valued, sub-linear, and bounded, iff for all \(f,g\in X,\, c\in \mathbb {R}\)
The set \(X^\sim \) consists of all non-negative-valued, sub-linear, bounded functionals T on X.
Since we deal with non-linear approximation, error functionals will not be sub-linear. Instead we discuss remainders \((E_{n})_{n=1}^\infty \), \(E_n : X\rightarrow [0,\infty )\) that fulfill following conditions for \(m\in \mathbb {N}\), \(f, f_1, f_2,\ldots , f_m\in X\), and constants \(c\in \mathbb {R}\):
Constant \(D_n\) is independent of f. These conditions are fulfilled for \(E_n(f):=E({{\mathcal {M}}}_n, f)_{p,\varOmega }\).
Lemma 3
(K-functional) Let functionals \((E_{n})_{n=1}^\infty \), \(E_n : X\rightarrow [0,\infty )\) fulfill (10) and (13). The functionals should also fulfill not only (12) but a stability inequality: Let constant \(D_n\) in (12) be independent of n, i.e.,
for a constant \(D_0>0\) and all \(n\in \mathbb {N}\). Also, a Jackson-type inequality (\(0<\varphi (n)\le 1\))
\(D_1>0\), is required that holds for all functions g in a subspace \(U\subset X\) with semi-norm \(|\cdot |_U\). For \(n\ge 2\) and a constant \(D_2>0\), the sequence \((\varphi (n))_{n=1}^\infty \) has to fulfill
Via the Peetre K-functional
one can estimate
for \(n\ge 2\) with a constant C that is independent of f and n.
Proof
Let \(g\in U\). Then

thus for \(n\ge 2\):

\(\square \)
We apply the lemma to (9) with \(X=L^2(\varOmega )\), \(U=W_2^r(\varOmega )\), \(\varphi (n)=n^{-\frac{r}{d}}\). Error functional \( E(\mathcal{M}_n, f)_{2,\varOmega }\) fulfills all prerequisites. In connection with the equivalence between K-functionals and moduli of smoothness [20, p. 120] we get
Theorem 3
(Piecewise Polynomial Functions) Let \(d\ge 2\), \(\varOmega \subset \mathbb {R}^d\) be the d-dimensional unit ball and \(\sigma \) a piecewise polynomial activation function of type (7). Constants \(C_1, C_2\in \mathbb {R}\) exist such that for each \(f\in L^2(\varOmega )\), \(n\ge 2\), \(r<k+1+\frac{d-1}{2}\):
The saturation order of the modulus is \(n^{-\frac{r}{d}}\), so term \(n^{-\frac{r}{d}} \Vert f\Vert _{L^2(\varOmega )}\) is only technical. The estimate also holds for ReLU (\(k=1\)) with only one (\(d=1\)) input node for \(r=2\), see [16]. It can be extended to the cut activation function because cut can be written as a difference of ReLU and translated ReLU.
3 Sharpness due to counterexamples
A coarse lower estimate can be obtained for all integrable activation functions in the \(L^2\)-norm based on an estimate for ridge functions in [26]. However, the general setting leads to an exponent \(\frac{r}{d-1}\) instead of \(\frac{r}{d}\).
The space of all measurable, real-valued functions that are integrable on every compact subset of \(\mathbb {R}\) is denoted by \(L(\mathbb {R})\).
Lemma 4
Let \(\sigma \) be an arbitrary activation function in \(L(\mathbb {R})\) and \(r\in \mathbb {N}\), \(d\ge 2\). Let \(\varOmega \) be the d-dimensional unit ball.
Then there exists a sequence \((f_n)_{n=1}^\infty \), \(f_n\in W_2^{r}(\varOmega )\), with \(\Vert f_n\Vert _{W_2^{r}(\varOmega )}\le C_0\), and a constant \(c>0\) such that (cf. Theorem 1)
Proof
This is a direct corollary of Theorem 1 in [26]: For \(A\subset \mathbb {R}^d\) with cardinality |A| let R(A) be the linear space that is spanned by all functions \(h(\mathbf {w}\cdot \mathbf {x})\), \(h\in L(\mathbb {R})\), \(\mathbf {w}\in A\). Thus in contrast to one activation function, different nearly arbitrary functions h are allowed to be used with different vectors \(\mathbf {w}\) in linear combinations. Let \(\mathcal{R}_n :=\bigcup _{A\subset \mathbb {R}^d : |A|\le n} R(A)\) be the space of functions that can be represented as \(\sum _{k=1}^n a_k h_k(\mathbf {w}_k\cdot \mathbf {x})\), \(a_k\in \mathbb {R}\), \(h_k\in L(\mathbb {R})\), \(\mathbf {w}_k\in \mathbb {R}^d\). Then for all activation functions \(\sigma \in L(\mathbb {R})\) one has \(h_k(x):=\sigma (x+c_k)\in L(\mathbb {R})\) for \(c_k\in \mathbb {R}\), i.e. \({{\mathcal {M}}}_n\subset {{\mathcal {R}}}_n\). According to [26], for \(d\ge 2\) there exist constants \(0<c\le C\) independently of n such that
From this condition, we obtain functions \(f_n\in W_2^{r}(\varOmega )\), \(\Vert f_n\Vert _{W_2^{r}(\varOmega )}\le C_0\), such that
and (see (8))
\(\square \)
By considering properties of the activation function, better lower estimates are possible. For the logistic activation function and activation functions that are splines of fixed polynomial degree with finite number of knots like (7), Maiorov and Meir showed that there exists a sequence \((f_n)_{n=2}^\infty \), \(f_n\in W_p^{r}(\varOmega )\), \(r\in \mathbb {N}\), with \(\Vert f_n\Vert _{W_p^{r}(\varOmega )}\) uniformly bounded, and a constant \(c>0\) (independent of \(n\ge 2\)) such that (see [27, Theorems 4 and 5, p. 99, Corollary 2, p. 100])
for \(1\le p< \infty \) (and \(L^\infty (\varOmega )\), but we consider \(C(\overline{\varOmega })\) due to the definition of moduli of smoothness). Without explicitly saying so, the proof is based on a VC dimension argument similar to the proof of Theorem 5 that follows in this section. It uses [27, Lemma 7, p. 99]. The formula in line 4 on page 98 of [27] shows that (by choosing parameter m as in the proof of [27, Theorem 4]) one additionally has
This result was proved for \(\varOmega \) being the unit ball. But similar to Theorem 5 below, a grid is used that can also be adjusted to \(\varOmega =(0, 1)^d\).
We now apply a resonance principle from [16] that is a straight-forward extension of a general theorem by Dickmeis, Nessel and van Wickern, see [13]. With this principle, we condense sequences \((f_n)_{n=1}^\infty \) like the one in (18) to single counterexamples.
To measure convergence rates, abstract moduli of smoothness \(\omega \) are often used, see [30, p. 96ff]. An abstract modulus of smoothness is a continuous, increasing function \(\omega : [0,\infty ) \rightarrow [0,\infty )\) such that for \(\delta _1,\delta _2 > 0\)
Typically, Lipschitz classes are defined via \(\omega (\delta ):=\delta ^\alpha \), \(0 < \alpha \le 1\).
Theorem 4
(Adapted Uniform Boundedness Principle, see [16]) Let \((E_{n})_{n=1}^\infty \) be a sequence of remainders that map elements of a real Banach space X to non-negative numbers, i.e.,
The sequence has to fulfill conditions (10)–(13). Also, a family of sub-linear bounded functionals \(S_\delta \in X^\sim \) for all \(\delta >0\) is given. These functionals will represent moduli of smoothness. To express convergence rates, let
be strictly decreasing with \(\lim _{x\rightarrow \infty } \varphi (x)=0\). Since remainder functionals \(E_n\) are not required to be sub-linear, \(\varphi \) also has to fulfill following condition. For each \(0<\lambda <1\) there has to be a real number \(X_0=X_0(\lambda )\ge \lambda ^{-1}\) and constant \(C_\lambda >0\) such that for all \(x>X_0\) there holds
If test elements \(h_n\in X\) and a number \(n_0\in \mathbb {N}\) exist such that for all \(n\in \mathbb {N}\) with \(n\ge n_0\) and for all \(\delta >0\)
then for each abstract modulus of smoothness \(\omega \) satisfying (20) and
a counterexample \(f_\omega \in X\) exists such that
and
When dealing with the sup-norm, one can generally apply the resonance theorem in connection with known VC dimensions of indicator functions. The general definition of VC dimension based on sets is as follows.
Let X be a finite set and \({{\mathcal {A}}}\subset {{\mathcal {P}}}(X)\) a family of subsets of X. Set \(S\subset X\) is said to be shattered by \({{\mathcal {A}}}\) iff each subset \(B\subset S\) can be represented as \(B=S\cap A\) for a family member \(A\in {{\mathcal {A}}}\). Thus, the set \(\{S\cap A : A\in {{\mathcal {A}}}\}\) has \(2^{|S|}\) elements, |S| denoting the cardinality S.
is called the VC dimension of \({{\mathcal {A}}}\).
For our purpose, we discuss a (non-linear) set V of functions \(g:X\rightarrow \mathbb {R}\) on a set \(X\subset \mathbb {R}^m\). Using Heaviside-function \(H:\mathbb {R}\rightarrow \{0, 1\}\),
let
Then one typically defines \({\text {VC-dim}}(V):={\text {VC-dim}}({{\mathcal {A}}})\). Thus, \(k:={\text {VC-dim}}(V)\) is the largest cardinality of a subset \(S=\{x_1, \dots , x_k\}\subset X\) such that for each sign sequence \(s_1,\ldots , s_k\in \{-1, 1\}\) a function \(g\in V\) can be found that fulfills (cf. [5])
Theorem 5
(Sharpness due to VC Dimension) Let \((V_n)_{n=1}^\infty \) be a sequence of (non-linear) function spaces \(V_n\) of bounded real-valued functions on \([0, 1]^d\) such that
fulfills conditions (10)–(13) on Banach space \(C([0, 1]^d)\). An equidistant grid \(X_n\subset [0, 1]^d\) with a step size \(\frac{1}{\tau (n)}\), \(\tau :\mathbb {N} \rightarrow \mathbb {N}\), is given via
Let
be the set of functions that are generated by restricting functions of \(V_n\) to this grid. As in Theorem 4, convergence rates are expressed via a function \(\varphi (x)\) that fulfills the requirements of Theorem 4 including condition (21). Let VC dimension of \(V_{n,\tau (n)}\) and function values of \(\tau \) and \(\varphi \) be coupled via inequalities
for all \(n\ge n_0\in \mathbb {N}\) with a constant \(C>0\) that is independent of n.
Then, for \(r\in \mathbb {N}\) and each abstract modulus of smoothness \(\omega \) satisfying (20) and (25), there exists a counterexample \(f_{\omega }\in C([0, 1]^d)\) such that for \(\delta \rightarrow 0+\) and \(n\rightarrow \infty \)
Proof
Condition (27) implies for \(4n\ge n_0\) that a sequence of signs \(s_{\mathbf {z}}\in \{-1, 1\}\) for points \(\mathbf {z}\in X_{4n}\) exists such that no function in \(V_{4n}\) can reproduce the sign of the sequence in each point of \(X_{4n}\), i.e., for each \(g\in V_{4n}\) there exists a point \(\mathbf {z}_0 \in X_{4n}\) such that
Based on this sign sequence, we construct an arbitrarily often partially differentiable resonance function \(h_n\) such that its function values equal the signs on the grid \(X_{4n}\). To this end, we use the arbitrarily often differentiable function
with properties \(h(0)=1\) and \(\Vert h\Vert _{B(\mathbb {R})}=1\). Based on h, we define \(h_n\):
Scaling factors \(2\cdot \tau (4n)\) are chosen such that supports of summands only intersect at their borders. Therefore, \(\Vert h_n\Vert _{C([0, 1]^d)}\le 1\) and \(h_n(\mathbf {z})=s_{\mathbf {z}}\) for all \(\mathbf {z}\in X_{4n}\).
All partial derivatives of order up to r are in \(O([\varphi (n)]^{-r})\) because of (28). Additionally to \(h_n\), we choose parameters in Theorem 4 as follows:
and \(E_n(f)\) as in (26). We do not directly use \(\varphi (x)\) with Theorem 4. Instead, function \([\varphi (x)]^r\) fulfills the requirements of the function also called \(\varphi (x)\) in Theorem 4.
Requirements (22) and (23) can be easily shown due to the sup-norms of \(h_n\) and its partial derivatives, cf. (8).
Resonance condition (24) is fulfilled due to the definition of \(h_n\): For each \(g\in V_{4n}\) there exits at least one point \(\mathbf {z}_0\in X_{4n}\) such that
Function \(h_n\) is defined to fulfill \(|h_n(\mathbf {z}_0)|=|s_{\mathbf {z}_0}|=1\). Thus,
and \(E_{4n} h_n \ge 1\).
All preliminaries of Theorem 4 are fulfilled such that counterexamples exist as stated.\(\square \)
Theorem 6
(Sharpness for Logistic Function Approximation in Sup-Norm) Let \(\sigma \) be the logistic function and \(r\in \mathbb {N}\). For each abstract modulus of smoothness \(\omega \) satisfying (20) and (25), a counterexample \(f_{\omega }\in C([0, 1]^d)\) exists such that for \(\delta \rightarrow 0+\)
and for \(n\rightarrow \infty \)
For univariate approximation, i.e., \(d=1\), the theorem is proved in [16]. This proof can be generalized as follows.
Proof
Let \(D\in \mathbb {N}\). In [5], an upper bound for the VC dimension of function spaces
is derived. Functions are defined on a discrete set with \((2D+1)^d\) points. Please note that the constant function \(a_0\) is not consistent with the definition of \({{\mathcal {M}}}_n\). It provides an additional degree of freedom.
We apply Theorem 2 in [5]: There exists \(n^*\in \mathbb {N}\) such that for all \(n\ge n^*\) the VC dimension of \(\varDelta _n\) is upper bounded by
i.e., there exists an \(n_0\ge \max \{2, n^*\}\), \(n_0\in \mathbb {N}\), and a constant \(C_d>0\), dependent on d, such that for all \(n\ge n_0\)
Let constant \(E>1\) be chosen such that
This is possible because
Now we choose a suitable value of \(D=D(n)\) such that the VC dimension of \(\varDelta _n\) is less than \([D(n)]^d\). To this end, let
Then we get for \(n\ge n_0\) with (29):
One can map interval \([-D, D]^d\) to \([0, 1]^d\) with an affine transform. By also omitting constant \(a_0\), we estimate the VC dimension of \(V_{n,\tau (n)}\) with parameters \(V_n:={{\mathcal {M}}}_n\) and \(\tau (n):=2D(n):\)
Thus, (27) is fulfilled. Conditions (10)–(13) are chosen such that they fit with error functionals
For strictly decreasing function
conditions \(\lim _{x\rightarrow \infty } \varphi (x) = 0\) and (21) hold. Latter can be shown for \(x>X_0(\lambda ):=\lambda ^{-2}\) because \(\log _2(\lambda ) > -\log _2(x)/2\) and
Finally, (28) follows from
Thus, Theorem 5 can be applied to obtain the counterexample.\(\square \)
The theorem can also be proved based on the sequence \((f_n)_{n=1}^\infty \) from [27] with properties (18) and (19). We use this sequence to obtain the sharpness in \(L^p\) norms for approximation with piecewise polynomial activation functions as well as with the logistic function.
Theorem 1 in [25] provides a general means to obtain such bounded sequences in Sobolev spaces for which approximation by functions in \({{\mathcal {M}}}_n\) is lower bounded with respect to pseudo-dimension.
We condense sequence \((f_n)_{n=1}^\infty \) to a single counterexample with the next theorem.
Theorem 7
(Sharpness with \(L^p\)-Norms) Let \(\sigma \) be either the logistic function or a piecewise polynomial activation function of type (7) and \(r\in \mathbb {N}\). Let \(\varOmega \) be the d-dimensional unit ball, \(d\in \mathbb {N}\), \(1\le p<\infty \). For each abstract modulus of smoothness \(\omega \) satisfying (20) and (25), a counterexample \(f_{\omega }\in L^p(\varOmega )\) exists such that for \(\delta \rightarrow 0+\)
and for \(n\rightarrow \infty \)
Proof
We apply Theorem 4 with following parameters for \(n\ge 2\):
Function \(\varphi (x)\) satisfies the prerequisites of Theorem 4 similarly to the proof of Theorem 6. Also, conditions (10)–(13) hold true for \(E_n\). For \(r\in \mathbb {N}\), we use the sequence \((f_n)_{n=2}^\infty \) of (18) to define resonance elements
such that functions \(h_n\) are uniformly bounded in \(L^p(\varOmega )\) due to (19) in \(L^p(\varOmega )\). Thus, (22) is fulfilled. From (18) we obtain resonance condition (24)
Since \((\Vert f_n\Vert _{W_p^{r}(\varOmega )})_{n=2}^\infty \) is bounded, estimate (8) yields (23):
Thus, all prerequisites of Theorem 4 are fulfilled such that counterexamples exist as stated.\(\square \)
With respect to error bound (6) for synchronous approximation, counterexamples can be obtained due to the following observation for \(\alpha \in \mathbb {N}_0^d\), \(|\alpha |=k\):
In the univariate case \(d=1\), a counterexample for approximation with \(\sigma ^{(k)}\) can be integrated to become a counterexample that shows sharpness of (6). For example, \(\sigma (x)=\frac{1}{2}+\frac{1}{\pi } \arctan (x)\) is discussed in [16, Corollary 4.2]. The given proof shows that for each abstract modulus of smoothness \(\omega \) satisfying (20) and (25), a continuous counterexample \(f_\omega '\) exists such that \(\omega _1(f_{\omega }', \delta )_{\infty , \varOmega } = {O}\left( \omega (\delta )\right) \) and \(E({{\mathcal {M}}}_{n,\sigma '} f_\omega ')_{\infty , \varOmega } \ne o\left( \omega \left( \frac{1}{n}\right) \right) \). Thus, one can choose \(f_\omega (x):=\int _0^x f'_\omega (t)\,dt\). In the multivariate case however, integration with respect to one variable does not lead to sufficient smoothness with regard to other variables.
4 Conclusions
By setting \(\omega (\delta ):=\delta ^{\alpha \frac{d}{r}}\), we have shown the following for the logistic function. For each \(0<\alpha <\frac{r}{d}\) condition (25) is fulfilled, and according to Theorem 6 there exists a counterexample \(f_{\omega }\in C([0, 1]^d)\) with
such that for all \(\beta >\alpha \)
With Theorem 7, similar \(L^p\) estimates for the logistic function and \(L^2\) estimates for piecewise polynomial activation functions (7) hold true, see direct \(L^2\)-norm estimate (17). With one input node (\(d=1\)), a lower estimate for piecewise polynomial activation functions without the \(\log \)-factor can be proved easily, see [16]. Thus, the bound in Theorem 7 might be improvable.
Future work can deal with sharpness of error bound (6) for synchronous approximation in the multivariate case. By extending quantitative uniform boundedness principles with multiple error functionals (cf. [12, 17, 18]) to non-linear approximation (cf. proof of Theorem 4 in [16]), one might be able to show simultaneous sharpness in different (semi-) norms like this conjecture: Under the preliminaries of Theorem 2, the following might hold true for the logistic activation function: For each abstract modulus of continuity \(\omega \) fulfilling (25) there exists a k-times continuously differentiable counterexample \(f_\omega \) such that for each \(r\in \{0,\ldots ,k\}\) it simultaneously fulfills (\(\delta \rightarrow 0+\), \(n\rightarrow \infty \))
References
Adams, R.A.: Sobolev Spaces. Academic Press, New York (1975)
Anastassiou, G.: Rate of convergence of some multivariate neural network operators to the unit. Comput. Math. Appl. 40, 1–19 (2000)
Bagby, T., Bos, L., Levenberg, N.: Multivariate simultaneous approximation. Constr. Approx. 18, 569–577 (2002)
Barron, A.R.: Universal approximation bounds for superpositions of a sigmoidal function. IEEE Trans. Inf. Theory 39(3), 930–945 (1993)
Bartlett, P.L., Williamson, R.C.: The VC dimension and pseudodimension of two-layer neural networks with discrete inputs. Neural Comput. 8(3), 625–628 (1996)
Chen, T., Chen, H.: Universal approximation to nonlinear operators by neural networks with arbitrary activation functions and its application to dynamical systems. IEEE Trans. Neural Netw. 6(4), 911–917 (1995)
Costarelli, D.: Sigmoidal Functions Approximation and Applications. Doctoral thesis, Roma Tre University, Rome (2014)
Costarelli, D., Spigler, R.: Approximation results for neural network operators activated by sigmoidal functions. Neural Netw. 44, 101–106 (2013)
Costarelli, D., Spigler, R.: Multivariate neural network operators with sigmoidal activation functions. Neural Netw. 48C, 72–77 (2013)
Cybenko, G.: Approximation by superpositions of a sigmoidal function. Math. Control Signals Syst. 2(4), 303–314 (1989)
Debao, C.: Degree of approximation by superpositions of a sigmoidal function. Approx. Theory Appl 9(3), 17–28 (1993)
Dickmeis, W.: On quantitative condensation of singularities on sets of full measure. Approx. Theory Appl. 1, 71–84 (1985)
Dickmeis, W., Nessel, R.J., van Wickeren, E.: Quantitative extensions of the uniform boundedness principle. Jahresber. Deutsch. Math.-Verein. 89, 105–134 (1987)
Funahashi, K.I.: On the approximate realization of continuous mappings by neural networks. Neural Netw. 2, 183–192 (1989)
Goebbels, S.: A counterexample regarding “New study on neural networks: the essential order of approximation”. Neural Netw. 123, 234–235 (2020)
Goebbels, S.: On sharpness of error bounds for univariate approximation by single hidden layer feedforward neural networks. Res. Math. 75(3), 1–35 (2020)
Imhof, L., Nessel, R.J.: The sharpness of a pointwise error bound for the Fejér–Hermite interpolation process on sets of positive measure. Appl. Math. Lett. 7, 57–62 (1994)
Imhof, L., Nessel, R.J.: A resonance principle with rates in connection with pointwise estimates for the approximation by interpolation processes. Numer. Funct. Anal. Optim. 16, 139–152 (1995)
Ito, Y.: Extension of approximation capability of three layered neural networks to derivatives. In: Marinaro, M., Tagliaferri, R. (eds.) IEEE International Conference on Neural Networks, vol. 1, pp. 377–381 (1993)
Johnen, H., Scherer, K.: On the equivalence of the K-functional and moduli of continuity and some applications. In: Schempp, W., Zeller, K. (eds.) Constructive Theory of Functions of Several Variables. Proceedings of Conference Oberwolfach 1976, pp. 119–140 (1976)
Jones, L.K.: Constructive approximations for neural networks by sigmoidal functions. Proceedings of the IEEE 78(10), 1586–1589, Correction and addition in Proc. IEEE 79 (1991), 243 (1990)
Kůrková, V.: Rates of approximation of multivariable functions by one-hidden-layer neural networks. In: Marinaro, M., Tagliaferri, R. (eds.) Neural Nets WIRN VIETRI-97, Perspectives in Neural Computing, pp. 147–152. Springer, London (1998)
Leshno, M., Lin, V.Y., Pinkus, A., Schocken, S.: Multilayer feedforward networks with a nonpolynomial activation function can approximate any function. Neural Netw. 6(6), 861–867 (1993)
Lin, S., Rong, Y., Xu, Z.: Multivariate Jackson-type inequality for a new type neural network approximation. Appl. Math. Modell. 38(24), 6031–6037 (2014)
Maiorov, V., Ratsaby, J.: On the degree of approximation by manifolds of finite pseudo-dimension. Constr. Approx. 15, 291–300 (1999)
Maiorov, V.E.: On best approximation by ridge functions. J. Approx. Theory 90, 66–94 (1999)
Maiorov, V.E., Meir, R.: On the near optimality of the stochastic approximation of smooth functions by neural networks. Adv. Comput. Math. 13, 79–103 (2000)
Pinkus, A.: Approximation theory of the MLP model in neural networks. Acta Numer. 8, 143–195 (1999)
Ritter, G.: Efficient estimation of neural weights by polynomial approximation. IEEE Trans. Inf. Theory 45(5), 1541–1550 (1999)
Timan, A.: Theory of Approximation of Functions of a Real Variable. Pergamon Press, New York (1963)
Wang, J., Xu, Z.: New study on neural networks: the essential order of approximation. Neural Netw. 23(5), 618–624 (2010)
Xie, T., Cao, F.: The errors of simultaneous approximation of multivariate functions by neural networks. Comput. Math. Appl 61(10), 3146–3152 (2011)
Funding
Open Access funding enabled and organized by Projekt DEAL.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
On behalf of all authors, the corresponding author states that there is no conflict of interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Goebbels, S. On sharpness of error bounds for multivariate neural network approximation. Ricerche mat 71, 633–653 (2022). https://doi.org/10.1007/s11587-020-00549-x
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11587-020-00549-x
Keywords
- Neural networks
- Sharpness of error bounds
- Counterexamples
- Rates of convergence
- Uniform boundedness principle