
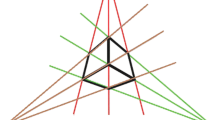
In this paper, we show how to calibrate a camera and to recover the geometry and the photometry (textures) of objects from a single image. The aim of this work is to make it possible walkthrough and augment reality in a 3D model reconstructed from a single image. The calibration step does not need any calibration target and makes only four assumptions: (1) the single image contains at least two vanishing points, (2) the length (in 3D space) of one line segment (for determining the translation vector) in the image is known, (3) the principle point is the center of the image, and (4) the aspect ratio is fixed by the user. Each vanishing point is determined from a set of parallel lines. These vanishing points help determine a 3D world coordinate system R o. After having computed the focal length, the rotation matrix and the translation vector are evaluated in turn for describing the rigid motion between R o and the camera coordinate system R c. Next, the reconstruction step consists in placing, rotating, scaling, and translating a rectangular 3D box that must fit at best with the potential objects within the scene as seen through the single image. With each face of a rectangular box, a texture that may contain holes due to invisible parts of certain objects is assigned. We show how the textures are extracted and how these holes are located and filled. Our method has been applied to various real images (pictures scanned from books, photographs) and synthetic images.
Similar content being viewed by others


Author information
Authors and Affiliations
Rights and permissions
About this article
Cite this article
Guillou, E., Meneveaux, D., Maisel, E. et al. Using vanishing points for camera calibration and coarse 3D reconstruction from a single image. Visual Comp 16, 396–410 (2000). https://doi.org/10.1007/PL00013394
Issue Date:
DOI: https://doi.org/10.1007/PL00013394