
Abstract
We obtain optimal emission levels and abatement expenditures in a finite-horizon transboundary pollution game with emission trading between two regions. We show that emission trading has significant impact on the optimal strategies and profits of the two regions. We find that cooperation between the regions leads to increased abatement and lower emissions, resulting in a lower pollution stock. We also provide a stochastic extension in which the pollution stock and the emission trading price are diffusion processes and solve it numerically.






Similar content being viewed by others

References
Athanassoglou S, Xepapadeas A (2012) Pollution control with uncertain stock dynamics: when, and how, to be precautious. J Environ Econ Manag 63:304–320
Basar T, Olsder GJ (1999) Dynamic noncooperative game theory. SIAM, Philadelphia
Benchekroun H, Chaudhuri A (2013) Transboundary pollution and clean technologies. Resour Energy Econ 36:601–619
Benchekroun H, Martín-Herrán G (2016) The impact of foresight in a transboundary pollution game. Eur J Oper Res 251:300–309
Bertinelli L, Camacho C, Zou B (2014) Carbon capture and storage and transboundary pollution: a differential game approach. Eur J Oper Res 237:721–728
Chang K, Wang S, Peng K (2013) Mean reversion of stochastic convenience yields for \(\text{ CO }_2\) emissions allowances: empirical evidence from the EU ETS. Span Rev Financ Econ 11:39–45
Chang S, Wang X, Wang Z (2015) Modeling and computation of transboundary industrial pollution with emissions permits trading by stochastic differential game. PLoS ONE 10:e0138641
Dobos I (2005) The effects of emission trading on production and inventories in the Arrow–Karlin model. Int J Prod Econ 93:301–308
Dobos I (2007) Tradable permits and production-inventory strategies of the firm. Int J Prod Econ 108:329–333
Dockner E, Jorgensen S, Long NV, Sorger G (2000) Differential games and management science. Cambridge University Press, Cambridge
Dockner E, Long N (1993) International pollution control: cooperative versus noncooperative strategies. J Environ Econ Manag 24:13–29
Daskalakis G, Psychoyios D, Markellos R (2009) Modeling \(\text{ CO }_2\) emission allowance prices and derivatives: evidence from the European trading scheme. J Bank Finance 33:1230–1241
Farzin Y, Kort P (2000) Pollution abatement investment when environmental regulation is uncertain. J Public Econ Theory 2(2):183–212
Hall N (2007) Transboundary pollution: harmonizing international and domestic law. Univ Mich J Law Reform 40:681–746
Huang X, He P, Zhang W (2016) A cooperative differential game of transboundary industrial pollution between two regions. J Clean Prod 120:43–52
Kossioris G, Plexousakis M, Xepapadeas A, Zeeuw A, Maler K (2008) Feedback Nash equilibria for non-linear differential games in pollution control. J Econ Dyn Control 32:1312–1331
Li S (2014) A differential game of transboundary industrial pollution with emission permits trading. J Optim Theory Appl 163:642–659
Li S (2016) Dynamic optimal control of pollution abatement investment under emissio permits. Oper Res Lett 44:348–353
List J, Mason C (2001) Optimal institutional arrangements for transboundary pollutants in a second-best world: evidence from a differential game with asymmetric players. J Environ Econ Manag 42:277–296
Lundgren T (2003) A real options approach to abatement investments and green goodwill. Environ Resour Econ 25:17–31
Maler K, Zeeuw A (1998) The acid rain differential game. Environ Resour Econ 12:167–184
Masoudi N, Santugini M, Zaccour G (2015) A dynamic game of emissions pollution with uncertainty and learning. Environ Resour Econ 64:349–372
Seifert J, Uhrig-Homburg M, Wagner M (2008) Dynamic behavior of \(\text{ CO }_2\) spot prices. J Environ Econ Manag 56:180–194
Sethi SP, Thompson GL (2000) Optimal control theory: applications to management science and economics, 2nd edn. Springer, New York
Yeung D (2007) Dynamically consistent cooperative solution in a differential game of transboundary industrial pollution. J Optim Theory Appl 134:143–160
Yeung D, Petrosyan L (2008) A cooperative stochastic differential game of transboundary industrial pollution. Automatica 44:1532–1544
Yi Y, Xu R, Zhang S (2017) A cooperative stochastic differential game of transboundary pollution between two asymmetric nations. Math Probl Eng 2017:9492582
Youssef S (2009) Transboundary pollution, R&D spillovers and international trade. Ann Reg Sci 43:235–250
Zhang S, Wang X, Shananin A (2016) Modeling and computation of mean field equilibria in producers’ game with emission permits trading. Commun Nonlinear Sci Numer Simul 37:238–248
Author information
Authors and Affiliations
Corresponding author
Additional information
This Project was supported in part by the National Basic Research Program (2012CB955804), the Major Research Plan of the National Natural Science Foundation of China (91430108), the National Natural Science Foundation of China (11771322), and the Major Program of Tianjin University of Finance and Economics (ZD1302). The authors gratefully acknowledge the constructive suggestions offered by the referees and the Associate Editor.
Suresh Sethi taught an optimal control course as a visiting professor at the Technical University in Vienna in the summer of 1981. Englelbert Dockner was a student in this course. Over the years, Suresh Sethi had many interactions with Engelbert and his family. We are honored to dedicate to the memory of Engelbert Dockner our paper on a topic to which he contributed significantly.
Appendices
Appendix
A. Proof of Proposition 1
Proof
For \(i=1,2\), we guess the form of the value functions \(V_{\mathrm{Ni}}(P,t)\) to be linear in P, that is,
where \(l_i(t)\) and \(k_i(t)\) are functions of t. Then, we obtain these functions to verify that our guess is correct. By substituting the first-order conditions (6) and (20) into the system of HJB Eq. (5), we have
where
and
Noticing that the system (21) should be satisfied for all \(P\ge 0\), we can determine \(l_1(t)\), \(l_2(t)\), \(k_1(t)\), and \(k_2(t)\) by solving the following system of ordinary differential equations:
Solving the above ODE system, we can obtain
where
Then, the proof can be completed by substituting the above results into (6). \(\square \)
B. Proof of Corollary 1
Proof
-
(i)
Comparing (7b) and (7e) with the two regions’ instantaneous quotas \(E_{10}\) and \(E_{20}\), we can obtain the above mentioned conclusions.
-
(ii)
From Eqs. (7a) and (7d) we know
$$\begin{aligned} \frac{\partial V_{N1}}{\partial P}= & {} \left( \frac{ D}{r+\theta }-g_1\right) e^{-(r+\theta )(T-t)}-\frac{ D}{r+\theta }<0,\\ \frac{\partial V_{N1}}{\partial E_{10}}= & {} \left( e^{\rho _1(T-t)}-e^{-r(T-t)}\right) \frac{e^{-\rho _1T}S}{r+\rho _1}>0,\\ \frac{\partial V_{N2}}{\partial P}= & {} \left( \frac{\beta D}{r+\theta }-g_2\right) e^{-(r+\theta )(T-t)}-\frac{\beta D}{r+\theta }<0, \\ \frac{\partial V_{N2}}{\partial E_{20}}= & {} \left( e^{\rho _2(T-t)}-e^{-r(T-t)}\right) \frac{e^{-\rho _2T}S}{r+\rho _2}>0, \end{aligned}$$which completes the proof of results in (ii).
-
(iii)
Taking derivative on (7a) and (7d) with respect to S, respectively, we have
$$\begin{aligned} \frac{\partial V_{N1}}{\partial S}&=\frac{1}{r}\Big (\frac{C+1}{C}S-A+\frac{2\gamma C+\gamma +1}{\gamma C}\frac{D}{r+\theta }\Big )\Big (1-e^{-r(T-t)}\Big )\\&\quad +\frac{E_{10}e^{-\rho _1 T}}{1+\rho _1}\Big (e^{\rho _1(T-t)}-e^{-r(T-t)}\Big )\\&\quad +\frac{1}{\theta }\frac{2\gamma C+\gamma +1}{\gamma C}e^{-r(T-t)}\Big (\frac{D}{r+\theta }-g_1\Big )\Big (e^{-\theta (T-t)}-1\Big ), \\ \frac{\partial V_{N2}}{\partial S}&=\frac{1}{r}\Big (\frac{\gamma C+1}{\gamma C}S-A+\frac{2\gamma C+\gamma +1}{\gamma C}\frac{\beta D}{r+\theta }\Big )\Big (1-e^{-r(T-t)}\Big )\\&\quad +\frac{E_{20}e^{-\rho _2 T}}{1+\rho _2}\Big (e^{\rho _2(T-t)}-e^{-r(T-t)}\Big )\\&\quad +\frac{1}{\theta }\frac{2\gamma C+\gamma +1}{\gamma C}e^{-r(T-t)}\Big (\frac{\beta D}{r+\theta }-g_2\Big )\Big (e^{-\theta (T-t)}-1\Big ), \end{aligned}$$which imply that \(V_{N1}\) and \(V_{N2}\) are two quadratic functions concerning S on the real axis at any time before T, and the minimum points should be \(\phi -\tau _1(t)E_{10}\) and \(\psi -\tau _2(t)E_{20}\), respectively. Also, combining the condition \(0<S<\eta \), which must be satisfied to keep the emissions to be positive, and the condition \(S>0\), we can conclude the results in (iii).\(\square \)
C. Proof of Corollary 2
Proof
Substituting (7b), (7c), (7e) and (7f) into (3), we gain the following ordinary differential equation satisfied by the dynamic process of the pollution stock:
By solving the above equation, we can obtain the trajectory of the pollution stock (8).
Then, taking the derivative of (8) with respect to t, we have
from which the conclusions follow. \(\square \)
D. Proof of Proposition 2
Proof
We first guess that the joint value function \(V_C\) of the two regions is of the form
where \(l_C(t)\) and \(k_C(t)\) are the functions of t. Then, by substituting (10) and (24) into the HJB Eq. (16) satisfied by the joint value function, we obtain
where
Since Eq. (25) holds for every \(P\ge 0\), we have the following system of ordinary differential equations
Solving this ODE system, we obtain
where
\(\square \)
E. Proof of Corollary 3
Proof
-
(i)
Comparing (11b) and (11d) with the two regions’ instantaneous quotas \(E_{10}\) and \(E_{20}\), we can obtain the above conclusions.
-
(ii)
From Eq. (11a), we have
$$\begin{aligned} \frac{\partial V_{C}}{\partial P}= & {} \Big (\frac{(1+\beta )D}{r+\theta }-g_1-g_2\Big )e^{-(r+\theta )(T-t)}-\frac{ (1+\beta )D}{r+\theta }<0,\\ \frac{\partial V_{C}}{\partial E_{10}}= & {} \left( e^{\rho _1(T-t)}-e^{-r(T-t)}\right) \frac{Se^{-\rho _1T}}{r+\rho _1}>0,\\ \frac{\partial V_{C}}{\partial E_{20}}= & {} \left( e^{\rho _2(T-t)}-e^{-r(T-t)}\right) \frac{Se^{-\rho _2T}}{r+\rho _2}>0, \end{aligned}$$which completes the proof of (ii).
-
(iii)
Taking the derivative of (11a) with respect to S, we have
$$\begin{aligned} \frac{\partial V_{C}}{\partial S}&=\frac{1}{r}\Big (\frac{2\gamma C+\gamma +1}{2\gamma C}S-(1+\alpha ) A\\ {}&\quad +\frac{(1+\beta )D}{r+\theta }\frac{2\gamma C+\gamma +1}{2\gamma C}\Big )(1-e^{-r(T-t)})\\&\quad +\frac{1}{\theta }\frac{2\gamma C+\gamma +1}{2\gamma C}e^{-r(T-t)}\Big (\frac{(1+\beta ) D}{r+\theta }-g_1-g_2\Big )\left( e^{-\theta (T-t)}-1\right) \\&\quad +\left( e^{\rho _1(T-t)}-e^{-r(T-t)}\right) \frac{E_{10}e^{-\rho _1T}}{r+\rho _1}+\left( e^{\rho _2(T-t)}-e^{-r(T-t)}\right) \frac{E_{20}e^{-\rho _2T}}{r+\rho _1}, \end{aligned}$$which implies that \(V_{C}\) is a quadratic function of S at any time before T with the minimum point \(\frac{1}{2}({\bar{\phi }}-\tau _{C1}(t)E_{10}-\tau _{C2}(t)E_{20})\). Also, combining the condition \(0<S<{\bar{\eta }}\), which must be satisfied to keep the emissions nonnegative, and the condition \(S>0\), we can conclude (iii). \(\square \)
F. Proof of Corollary 4
Proof
Substituting (11b), (11c), (11d) and (11e) into (3), we have the following ordinary differential equation for the dynamics of the pollution stock in the cooperative game:
Its solution gives the trajectory of the pollution stock (12). Moreover, taking its derivative with respect to t gives
from which the results follow directly. \(\square \)
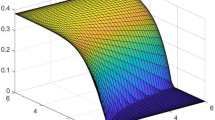
G. Numerical Method for (16)
Since the structure of HJB equations arising from the noncooperative case is similar to that of the cooperative one, here we only discuss the latter to save space.
From the first-order optimality condition, we know that Eq. (16) can split into the following coupled equations:
1.1 The Fitted Finite Volume Method for Spatial Discretization
A defined mesh for \((P_{\min },P_{\max }) \times (S_{\min },S_{\max })\) is significant in the process of discretization. So, we first divide the intervals \(I_{P}\) and \(I_{S}\) into \(N_P\) and \(N_S\) subintervals, respectively:
in which
Thus, a mesh on \(I_P \times I_S\), whose all mesh lines are perpendicular to the axes, is defined. Next we define another partition of \(I_P \times I_S\) by letting
for any \(i=1,2,\ldots ,N_P-1\) and \(j=1,2,\ldots ,N_S-1\). To keep completeness, we also define \(P_{-\frac{1}{2}}=P_{\min }\), \(P_{N_P+\frac{1}{2}}=P_{\max }\), \(S_{-\frac{1}{2}}=S_{\min },\) and \(S_{N_S+\frac{1}{2}}=S_{\max }\). The step sizes are defined by \(h_{P_i}=P_{i+\frac{1}{2}}-P_{i-\frac{1}{2}}\) and \(h_{S_j}=S_{j+\frac{1}{2}}-S_{j-\frac{1}{2}}\) for each \(i=0,1,\ldots ,N_P\) and \(j=0,1,\ldots ,N_S\).
Then, for the purpose of formulating finite volume scheme, we write Eq. (16) in the following divergence form:
where
It follows from integrating Eq. (29) over \({\mathcal {R}}_{i,j}=[S_{i-\frac{1}{2}},S_{i+\frac{1}{2}}]\times [\delta _{j-\frac{1}{2}},\delta _{j+\frac{1}{2}}]\) and applying the midpoint quadrature rule to the resulting equation that
for \(i=1,2,\ldots ,N_P-1\), \(j=1,2,\ldots ,N_S-1\), where \(R_{i,j}=(P_{i+\frac{1}{2}}-P_{i-\frac{1}{2}})\times (S_{j+\frac{1}{2}}-S_{j-\frac{1}{2}})\), \(c_{i,j}=c(P_i,S_j,t)\), \(V_{C_{i,j}}=V_C(P_i,S_j,t),\) and \(F_{C_{i,j}}=F_C(P_i,S_j,E^*_{C1},E_{C2}^*,a^*_{C1},a_{C2}^*,t)\).
The approximation of the second term in Eq. (31) is the key and difficult point of this numerical method. According to the definition of flux \(A \nabla V_C+{\underline{b}}V_C\) and integrating by parts, we have
where l denotes the unit vector outward-normal to \(\partial {\mathcal {R}}_{i,j}\). We approximate the first integral of Eq. (32) by a constant:
Now, we are in the position to derive the approximations to \((a_{11}\frac{\partial V_C}{\partial P}+a_{12}\frac{\partial V_C}{\partial S}+b_1V_C)\) at the midpoint, \((P_{i+\frac{1}{2}},S_j)\), of the interval \(I_{P_i}\) for any \(i=0,1,\ldots ,N_P-1\). To begin with, the term \(a_{11}\frac{\partial V_C}{\partial P}+b_1V_C\) can be approximated by a constant, which means that its derivative equals zero, that is,
where \(a=\frac{1}{2}\sigma _P^2\) and \(b_1^{i+\frac{1}{2},j}=b_1(P_{i+\frac{1}{2}},S_j)\), \(V_{C_{i,j}}\) and \(V_{C_{i+1,j}}\) denote the values of \(V_C\) at \((P_i,S_j)\) and \((P_{i+1},C_j)\), respectively. The above first-order ordinary differential equation can be solved by integrating both sides of Eq. (33a):
where \(C_1\) is an arbitrary constant and can be determined by the boundary conditions Eq. (33b) as follows:
where \(\alpha _{i,j}=\frac{b_1^{i+\frac{1}{2},j}}{a}\). Additionally, the derivative \(\frac{\partial V_C}{\partial S}\) can be approximated by a forward difference
As a result, we have
where \(d=\frac{1}{2}\rho \sigma _P\sigma _SPS\) and \(d_{i,j}=d(P_i,S_j)\). Applying the similar method to the other three terms of Eq. (32), we get the following results:
and
where \({\bar{\alpha }}_{i,j}=\frac{{\bar{b}}_{i,j+\frac{1}{2}}}{{\bar{a}}_j}\), \({\bar{a}}=\frac{1}{2}\sigma _S^2\), \({\bar{b}}=\mu -\sigma _S^2-\frac{1}{2}\rho \sigma _P\sigma _S\), and \({\bar{d}}_{i,j}=\frac{1}{2}\rho \sigma _P\sigma _S P_{i}\). Hence, we obtain the following equations by combining Eqs. (31), (32), and (34)–(37):
where
for \(i=1,2,\ldots ,N_P-1\), \(j=1,2,\ldots ,N_S-1\). The other elements \(e^{i,j}_{m,n}\) equal zeros when \(m\ne i-1,i,i+1\) and \(n \ne j-1,j,j+1\). We can see that system (38) is an \((N_P-1)^2 \times (N_S-1)^2\) linear system of equations for
Note that \(V_{C_{0,j}}(t),V_{C_{i,0}}(t),V_{C_{0,N_S}}(t),\) and \(V_{C_{N_P,0}}(t)\) for \(i=1,2,\ldots ,N_P\) and \(j=1,2,\ldots ,N_S\) equal to the given boundary conditions. Obviously, the coefficient matrix of system (38) is pentadiagonal.
1.2 The Implicit Difference Method for Time Discretization
Next we embark on the time discretization of system (38). To this purpose, we first rewrite Eq. (38) as
where
for \(i=1,2,\ldots ,N_P-1\) and \(j=1,2,\ldots ,N_S-1\). We select \(M-1\) points numbered from \(t^1\) to \(t^{M-1}\) between 0 and T, and let \(T=t^0\), \(t^M=0\) to form a partition of time \(T=t^0>t^1>\cdots >t^M=0\). Then, the full discrete form of Eq. (42) can be obtained by applying the two-level implicit time-stepping method with a splitting parameter \(\theta \in [\frac{1}{2},1]\) to it:
where
for \(m=0,1,\ldots ,M-1\). Note that \(\Delta t^m=t^{m+1}-t^m<0\), and \(V_C^m\) denotes the approximation of \(V_C\) at \(t=t^m\). Particularly, when we set \(\theta =\frac{1}{2}\), the scheme (43) becomes the famous Crank–Nicolson scheme and is second-order accuracy; when we set \(\theta =1\), the scheme (43) becomes the backward Euler scheme and is first-order accuracy.
1.3 Decoupling of the System
In the above discussion, we have assumed that the control variables \(E_{C1}^*\), \(a_{C1}^*\), \(E_{C2}^*\), and \(a_{C2}^*\) are known. However, we can see from (43) that they are coupled with \(V_C\) when \(\theta \ne 0\). To deal with this dilemma, we replace \(E_{C1}^*(t^{m+1})\), \(a_{C1}^*(t^{m+1})\), \(E_{C2}^*(t^{m+1})\), and \(a_{C2}^*(t^{m+1})\) by \(E_{C1}^*(t^{m})\), \(a_{C1}^*(t^{m})\), \(E_{C2}^*(t^{m})\), and \(a_{C2}^*(t^{m})\), respectively. This method should be reasonable because the control variables are just replaced by their values in the previous time step. The error is small if \(\Delta t^m\) is sufficiently small. The resulting system corresponding to (43) is as follows:
Rights and permissions
About this article

Cite this article
Chang, S., Sethi, S.P. & Wang, X. Optimal Abatement and Emission Permit Trading Policies in a Dynamic Transboundary Pollution Game. Dyn Games Appl 8, 542–572 (2018). https://doi.org/10.1007/s13235-018-0260-z
Published:
Issue Date:
DOI: https://doi.org/10.1007/s13235-018-0260-z